
AI 기반 로봇 팔과 자율 주행 로봇 개발 가속화
인공지능(AI) 컴퓨팅 기술 분야의 선두주자인 엔비디아가 세계 최대 규모 로봇 콘퍼런스인 로스콘에서 로봇운영체제(ROS) 개발자를 위한 생성형 AI 솔루션을 발표했다.
로스콘은 덴마크에서 가장 오래된 도시 중 하나이자 자동화의 중심지인 오덴세에서 21일(현지 시간)부터 사흘간 진행된다. 이번 발표에서 엔비디아는 로봇 생태계 파트너들과 함께 ROS 개발자를 위한 생성형 AI툴, 시뮬레이션, 인식 워크플로우를 공개했다.
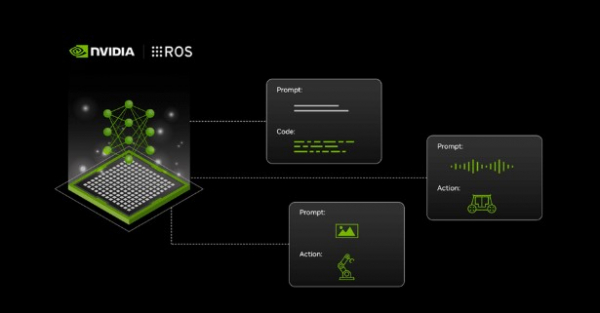
여기에는 엣지 AI와 로보틱스용 엔비디아 젯슨 플랫폼에 배포하는 ROS 개발자를 위한 새로운 생성형 AI 노드와 워크플로우가 포함됐다. 생성형 AI를 통해 로봇은 주변 환경을 인식하고 이해하며, 인간과 자연스럽게 소통하고, 자율적으로 상황에 맞는 결정을 내릴 수 있다.
ROS 2를 기반으로 구축된 리맴버는 생성형 AI를 사용해 로봇의 추론과 행동을 향상시킨다. 이는 거대 언어 모델(LLM), 비전 언어 모델(VLM), 검색 증강 생성(RAG)을 결합한다. 이를 통해 로봇이 장기적인 의미 기억을 구축하며 환경을 탐색하고 상호 작용하는 능력을 향상시킨다.
음성 인식 기능은 위스퍼TRT ROS 2 노드에 의해 구동된다. 이 노드는 엔비디아 텐서RT(TensorRT)를 사용해 오픈AI의 위스퍼(Whisper) 모델을 최적화해 엔비디아 젯슨에서 지연 시간이 짧은 추론을 가능하게 함으로써 인간과 로봇의 즉각적인 상호 작용을 가능하게 한다.
음성 제어 기능을 갖춘 ROS 2 로봇 프로젝트는 엔비디아 리바(Riva) ASR-TTS 서비스를 사용해 로봇이 음성 명령을 이해하고 이에 응답할 수 있도록 한다. 나사 제트추진연구소는 ROS용 AI 기반 에이전트인 로사를 독자적으로 선보였다. 이는 네뷸라-SPOT 로봇과 엔비디아 아이작 심의 엔비디아 노바 카터 로봇에서 작동했다.
로스콘에서 캐노니컬은 엔비디아 젯슨 오린 나노 시스템 온 모듈에서 실행되는 제로샷 물체 감지 모델인 나노OWL을 시연한다. 이 모델을 사용하면 로봇이 사전 정의된 범주에 의존하지 않고도 광범위한 물체를 실시간으로 식별할 수 있다.
개발자는 로봇 기능을 향상하기 위해 엔비디아 젯슨에 최적화된 LLM과 VLM을 제공하는 생성형 AI용 ROS 2 노드를 사용할 수 있다.
시뮬레이션은 배포 전에 AI 지원 로봇을 안전하게 테스트하고 검증하는 데 매우 중요한 작업이다. 오픈USD를 기반으로 구축된 로봇 시뮬레이션 플랫폼인 엔비디아 아이작 심은 ROS 개발자에게 로봇을 ROS 패키지에 쉽게 연결해 테스트할 수 있는 가상 환경을 제공한다. 현재 로봇 시뮬레이션과 테스트를 위한 엔드투엔드 워크플로우를 설명하는 새로운 ‘아이작 심을 사용한 ROS 2 워크플로우 초보자 가이드’가 제공되고 있다.








![[컬처콕 플러스] 아일릿, 논란 딛고 다시 직진할 수 있을까?](https://img.etoday.co.kr/crop/320/200/2095915.jpg)